HXP 系列六足位移台
- 产品详情
HXP 系列六足位移台
与堆叠平移台相比,HXP 六足位移台结构紧凑,可为复杂的多轴运动提供简单、精练的解决方案。其专用固件通过使用双坐标系简化了复杂运动的编程,并可自动计算坐标变换,以便直接对运动进行编程。
Ø具有 6 个独立运动轴的单个设备
Ø设计轻便紧凑,具有较高刚度
Ø无运动误差累计
Ø无移动电缆
ØRightPath 轨迹控制
Ø通过软件设置的两个虚拟旋转中心
产品型号
对比 | 型号 |
| HXP100-MECA六角,高精度,200毫米直径平台,20kg负载,M6 |
| HXP100P-MECA六角,高精度,200毫米直径平台,6kg负载,M6 |
| HXP50-MECA六角,高精度,125毫米直径平台,5kg负载,M6 |

产品规格
型号 |
|
|
|
尺寸 | Ø200 x 151 mm | Ø300 x 209 mm | Ø300 x 209 mm |
平台直径 | 125 mm | 200 mm | 200 mm |
行程范围 X、Y、Z1 | ±17, ±15, ±7 mm | ±27.5, ±25, ±14 mm | ±27.5, ±25, ±14 mm |
行程范围 ΘX、ΘY、ΘZ | ±9, ±8.5, ±18 ° | ±11.5, ±10.5, ±19 ° | ±11.5, ±10.5, ±19 ° |
较小位移增量 X、Y、Z2 | 0.10, 0.10, 0.05 µm | 0.5, 0.5, 0.25 µm | 0.10, 0.10, 0.05 µm |
较小位移增量 ΘX、ΘY、ΘZ | 0.05, 0.05, 0.10 mdeg | 0.25, 0.25, 0.5 mdeg | 0.05, 0.05, 0.10 mdeg |
单向重复精度 X、Y、Z - 典型值 | ±0.10, ±0.10, ±0.05 µm | ±0.25, ±0.25, ±0.125 µm | ±0.10, ±0.10, ±0.05 µm |
单向重复精度 ΘX, ΘY, ΘZ - 典型值 | ±0.05, ±0.05, ±0.10 mdeg | ±0.125, ±0.125, ±0.25 mdeg | ±0.05, ±0.05, ±0.10 mdeg |
较大速度 X、Y、Z | 14, 12, 5 mm/s | 2.5, 2, 1 mm/s | 12, 10, 5 mm/s |
较大速度(ΘX、ΘY、ΘZ) | 6, 6, 15 °/s | 1.8, 1.7, 3 °/s | 8, 8, 16 °/s |
刚度(X、Y、Z)3 | 2, 2, 25 N/µm | 5, 5, 40 N/µm | 3, 3, 24 N/µm |
中心负载4 | 50 N | 200 N | 60 N |
端口 | DB25 Male (6) and DB15 Male (6) | DB25 M (6), non vacuum compatible | DB25 Male (6) and DB15 Male (6) |
电缆长度 | 3 m | 3 m | 3 m |
电机 | DC Servo | DC Servo | DC Servo |
重量 | 2.2 kg | 7.2 kg | 7.2 kg |
螺纹类型 | M6 | M6 | M6 |
注释:
1.行程范围是相互依存的。 列出的值为较大值。 当所有其他轴都位于其居中位置时,该轴按轴移动。
2.显示的开环值
3.刚度取决于六脚架的位置。 给出了所有轴在其居中位置的值。
4.所示为水平底板的值。 有关产品页面上较大有效负载高度和悬臂距离的信息,请参见图表。
特征
平行运动 | |
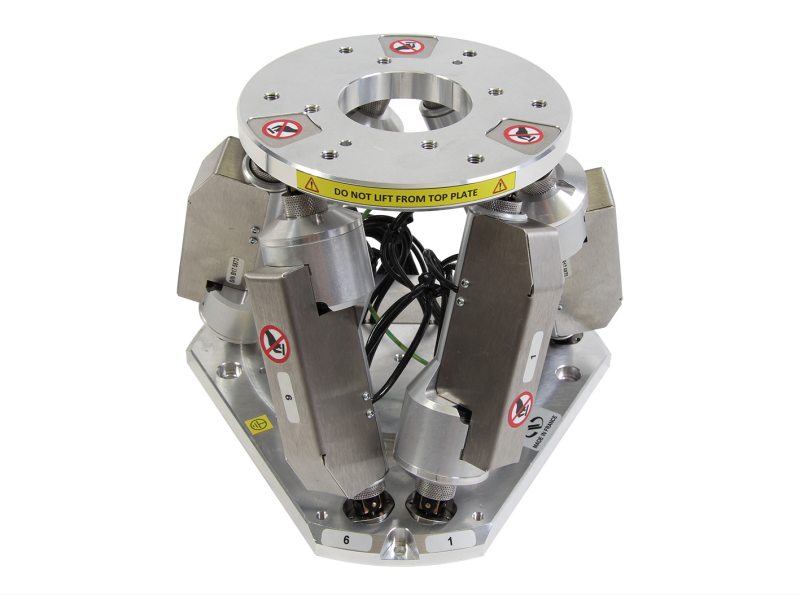
六脚架是复杂运动应用的巧妙而有效的解决方案, 这些应用要求在多达六个独立轴上具有高负载能力和精度。 平行运动学运动设备在紧凑的解决方案中为多轴定位提供了六个自由度(X,Y,Z,俯仰,横滚和偏航)。 作为堆叠多级的替代方案,六脚架没有移动的电缆,总成本较低,并且提供了误差补偿的运动。 | |
高精度促动器 | |
六足位移台的顶板由六个同步的高性能促动器驱动, 编码器安装在丝杠螺母上,用以实现准确 MIM、低侧隙与高速特性。 |
|
创新型促动器接头 | |
球形接头以紧凑,低调的设计增强刚度。 | 每个 Newport 六足位移台型号的联接系统都是不同的, 这样可以提高载重下的位置稳定性。 Newport 六足位移台采用球形接头或万向接头设计, 与相似尺寸的其他六足位移台相比,拥有五倍以上的刚度和两倍以上的载重能力。 |
两个旋转虚拟中心 | |
六脚架运动由全局坐标系和局部坐标系定义, 从而使编程运动对于标准研究,度量衡和制造应用而言更加直观。 用户较多可以对两个虚拟枢轴点进行编程,而无需计算坐标系转换或关闭控制器电源。 这两个虚拟枢轴点是两个可定义坐标系的原点:与顶板一起移动的工具和作为固定参考的工件。 这使用户可以概念化如何操作样品和工具。 对于这种六轴设备,简化了复杂的运动,以便于用户程序开发。 | |
世界:通用参考 工作:相对于世界的定义 工具:相对于顶板的定义 |
沿工具翻译 |
旋转工具 |
旋转工作 |
RightPath™轨迹控制 | |
| |
这些轨迹功能可通过以下方式促进运动: •移动过程中的较小跳动(偏离轨迹) •连续的多维运动路径 •沿轨迹路径的恒定速度 •移动开始和结束时的轨迹加速度相等:加速度=减速度 •在运动之前进行计算,因此没有滞后时间 |
|
HexaViz仿真软件 | |
| 我们的HexaViz六脚架模拟器使您可以在订购前发现 哪种较适合您的应用需求的Newport Hexapod模型。 纽波特的免费HexaViz Hexapod仿真软件提供了易于 使用的虚拟六脚架界面,用于评估行程范围,负载能力, 力和扭矩特性。 有关更多信息,请参见我们的HexaViz手册。 |
六足运动控制器 | |
我们的HXP-ELEC高性能多轴六脚运动控制器专用于Newport Hexapods。 HXP-ELEC与Newport XPS通用高性能运动控制器/驱动器基于相同的硬件, 但是预先配置了特殊固件以命令Hexapod机械手。 固件功能旨在简化编程和集成。 选择与您要控制的六脚架具有相同前缀的控制器。 有关兼容的控制器,请参见下面的附件表。 |
|
高精度,高负载和真空兼容版本 | |
| HXP系列还提供了可确保精度值的高精度六脚架版本, 这使这些六脚架可在需要位置精度的应用中使用。 当需要更高的负载时,High Load HXP系列可提供多达450 kg的中心负载能力。 对于真空应用,真空兼容HXP额定在10-6 hPa下使用。 |








应用
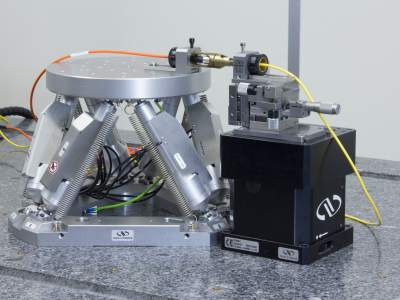
干涉仪 | |
| 通常,干涉测量是一类技术,其中叠加通常是电磁波的波以提取信息。 干涉仪可以将光学表面的平面度显示到非常高的分辨率。 纽波特提供了多种六脚架尺寸,可实现高精度干涉测量。 即使对于直径大于1.5 m的光学器件,我们的运动专家也可以根据您的要求定制六脚架。 |
镜面或光学定位 | |
光学组件通常需要敏感光学元件的严格对准和保持位置公差, 以准确地引导光束。 六脚架提供了六个自由度上的高精度和可重复运动的优势。 结合反馈系统,基于六脚架的光学系统甚至可以满足较高要求。 |
|
光纤或设备对准 | |
| 对于光纤或光学设备(单模或多模,单通道到多通道,Si光子)的对准, 至关重要的是,不仅要控制X,Y和Z的运动,还要控制尖端和倾斜的运动。 当与诸如APOGEE的对准软件配合使用时,该解决方案便成为了交钥匙式自动对准系统。 |
成像和显微镜 | |
光学和电子成像/显微镜涉及与样本相互作用的光/电子束的衍射, 反射或折射。 测量散射的辐射或电子,并将其用于图像的构造。 当对小型复杂结构进行成像时,Newport六脚架以紧凑的解决方案提供了高精度, 六自由度和运动控制的竞争优势。 |
|
衍射仪 | |
| 我们在同步加速器衍射测量解决方案设计方面的专业知识是很好的。 束脚处的样品位置较好用六脚架解决。 这些解决方案可为生命健康科学, 物理学和材料科学等领域的基础研究和应用研究提供服务。 |



配件
六轴并联运动控制器
以下的六轴并联运动控制器与这些高精密六轴并联定位系统兼容。根据您的六轴并联定位系统选择与之前缀相同的控制器版本。
对比 | 描述 |
| HXP50-ELEC-D运动控制器,六角, HXP50-MECA |
| HXP100-ELEC-D运动控制器,六角,HXP100-MECA |
| HXP100P-ELEC-D运动控制器,六角, HXP100P-MECA |